
ГОСТ 26059-89
(CT СЭВ 6496-88)
Группа Г17
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
РОБОТЫ ПРОМЫШЛЕННЫЕ.
ПНЕВМОДВИГАТЕЛИ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
Типы, основные параметры и присоединительные размеры
Industrial robots. Pneumatic motors of actuating mechanisms.
Types, basic parameters and mounting dimensions
ОКП 41 5115, 41 5116, 41 5126,
41 5128, 41 5138
Дата введения 1990-07-01
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством станкостроительной и инструментальной промышленности СССР
Министерством высшего и среднего специального образования РСФСР
РАЗРАБОТЧИКИ
А.И.Кудрявцев, канд. техн. наук; Л.И.Водопьян; П.О.Водопьян; А.И.Гольдшмидт; А.В.Никитский; П.Р.Зильман; А.А.Тульчинский; О.Б.Корытко, канд. техн. наук; А.С.Донской, канд. техн. наук; Ю.Я.Владимиров; С.Н.Колпашников, канд. техн. наук
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Государственного комитета СССР по управлению качеством продукции и стандартам от 07.12.89 N 3592
3. Срок проверки - 1996 г.
4. Стандарт полностью соответствует СТ СЭВ 6496-88
5. В стандарт введен международный стандарт ИСО 6432
6. ВЗАМЕН ГОСТ 26059-85
7. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
| Обозначение НТД, на который дана ссылка | Номер пункта |
| ГОСТ 15150-69 | 2.9 |
| ГОСТ 15608-81 | 2.3 |
| ГОСТ 17433-80 | Вводная часть |
| ГОСТ 19862-87 | То же |
| ИСО 6099 | табл.1 |
Настоящий стандарт устанавливает типы, основные параметры и присоединительные размеры пневмодвигателей исполнительных устройств промышленных роботов и других машин, работающих при давлении до 1,0 МПа на сжатом воздухе, очищенном не грубее 7-8-го классов загрязненности по ГОСТ 17433 и содержащем распыленное масло вязкостью от 10 до 32 мм![]() /с при температуре 50 °С с концентрацией 2-4 капли на 1 м
/с при температуре 50 °С с концентрацией 2-4 капли на 1 м![]() воздуха, приведенного к нормальным условиям по ГОСТ 19862.
воздуха, приведенного к нормальным условиям по ГОСТ 19862.
Стандарт не распространяется на специальные типы пневмодвигателей, используемых в промышленных роботах и других машинах.
1. ТИПЫ И ИСПОЛНЕНИЯ
1. ТИПЫ И ИСПОЛНЕНИЯ
1.1. Установлены следующие типы пневмодвигателей:
А1 - миниатюрные пневмоцилиндры двустороннего действия с диаметром цилиндра ![]() от 8 до 25 мм и ходом от 10 мм до 10
от 8 до 25 мм и ходом от 10 мм до 10![]() (ОКП 41 5126);
(ОКП 41 5126);
А2 - миниатюрные пневмоцилиндры одностороннего действия, толкающие, с пружинным возвратом, с диаметром цилиндра ![]() от 8 до 25 мм и ходом от 10 до 50 мм (ОКП 41 5138);
от 8 до 25 мм и ходом от 10 до 50 мм (ОКП 41 5138);
В - пневмоцилиндры двустороннего действия с диаметром цилиндра ![]() от 32 до 160 мм и ходом от 25 мм до 10
от 32 до 160 мм и ходом от 25 мм до 10![]() ;
;
С - пневмоцилиндры двустороннего действия с усиленным штоком с диаметром цилиндра ![]() от 32 до 80 мм и ходом от 10
от 32 до 80 мм и ходом от 10![]() до 20
до 20![]() (ОКП 41 5128);
(ОКП 41 5128);
D - поршневые поворотные пневмодвигатели (ОКП 41 5116);
Е - шиберные поворотные пневмодвигатели (ОКП 41 5115).
1.2. Установлены следующие исполнения пневмоцилиндров:
по обеспечению торможения
без торможения;
с регулируемым торможением в конце хода;
с нерегулируемым торможением;
по применению датчиков положения
без применения датчиков;
с применением датчиков.
по виду крепления - в соответствии с табл.1.
Таблица 1
| Тип пневмо- | Вид крепления | Обозначение вида крепления |
| А | Резьбовое крепление на передней крышке | MR3 |
| Крепление несъемной проушиной на задней крышке | МР3 | |
| Крепление на лапах на передней крышке | MS3 | |
| Крепление на переднем прямоугольном фланце (с двумя отверстиями) | MF8 | |
| В | На удлиненных шпильках | МХ1 |
| На лапах | MS1 | |
| На переднем фланце | MF1 | |
| На заднем фланце | MF2 | |
| На проушине | МР4 | |
| На задней вилке | МР2 | |
| На цапфах | МТ4 | |
| С | На удлиненных шпильках | МХ1 |
| На лапах | MS1 | |
| На переднем фланце | MF1 | |
| На заднем фланце | MF2 | |
| Цанговое | - |
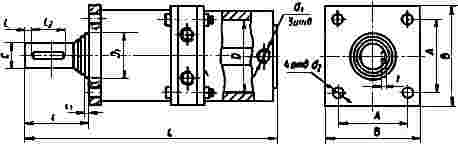
1.3. Установлены следующие исполнения поворотных пневмодвигателей:
одинарные (черт.1);
сдвоенные (черт.2).
Черт.1, 2. Исполнения поворотных пневмодвигателей
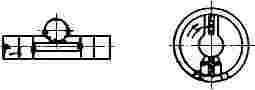
а - поршневой; б - шиберный
Черт.1
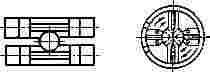
а - поршневой; б - шиберный
Черт.2
1.4. Поршневые поворотные пневмодвигатели изготавливают со сплошным (тип ![]() ) или полым валом (тип
) или полым валом (тип ![]() ).
).
2. ОСНОВНЫЕ ПАРАМЕТРЫ И ПРИСОЕДИНИТЕЛЬНЫЕ РАЗМЕРЫ
2.1. Номинальное давление пневмоцилиндров типов А, В и С и поршневых поворотных пневмодвигателей типа D - 1,0 МПа.
2.2. Номинальное давление шиберных поворотных пневмодвигателей - 0,63 МПа.
2.3. Основные параметры и присоединительные размеры пневмоцилиндров типа В должны соответствовать ГОСТ 15608.
2.4. Основные параметры и присоединительные размеры пневмодвигателей типов A1, A2, С, D и Е должны соответствовать приведенным на черт.3-9 и табл.2-7.
Примечание. Черт.3-9 не определяют конструкцию пневмодвигателей.
2.5. Максимальная скорость пневмоцилиндров типа А должна быть не менее 2 м/с, пневмоцилиндров типов В и С - не менее 1,5 м/с.
2.6. Климатические исполнения пневмодвигателей - УХЛ и О, категория размещения 4 по ГОСТ 15150.
2.7. Полный средний ресурс пневмоцилиндров типов А и В должен быть не менее 10![]() циклов при ходе до 250 мм, а при ходе свыше 250 мм - не менее 5000 км пройденного пути.
циклов при ходе до 250 мм, а при ходе свыше 250 мм - не менее 5000 км пройденного пути.
2.8. Полный средний ресурс пневмоцилиндров типа С должен быть не менее 6·10![]() циклов при ходе до 500 мм, а при ходе свыше 500 мм - не менее 6000 км пройденного пути.
циклов при ходе до 500 мм, а при ходе свыше 500 мм - не менее 6000 км пройденного пути.
2.9. Полный средний ресурс поворотных пневмодвигателей должен быть не менее:
8·10![]() циклов - для поршневых пневмодвигателей;
циклов - для поршневых пневмодвигателей;
10![]() циклов - для шиберных пневмодвигателей.
циклов - для шиберных пневмодвигателей.
Примечание к пп.2.7-2.9. Критерием предельного состояния пневмоцилиндров и поворотных пневмодвигателей является увеличение более чем в 2,5 раза утечек воздуха, установленных в технической документации, не устраняемых заменой уплотнений.
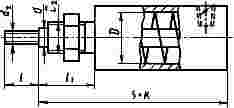
Черт.3. Миниатюрные пневмоцилиндры двустороннего действия - тип А1
Миниатюрные пневмоцилиндры двустороннего действия - тип А1
| Исполнение | Исполнение | |
|
|
|
|


Черт.3
Таблица 2
Размеры, мм
|
|
| Номинальная сила, Н, не менее | Ход. |
|
|
|
|
|
|
|
| ||||
| толка- | тяну- | номин. | пред. откл. | метри- | коническая по ГОСТ 6111 |
|
|
|
|
|
| ||||
|
|
| | |||||||||||||
| 8 | 4 | 43 | 28 | 10-80 | +1,5 | - | M5-6Н | - | 18 | 20 | M12х1,25-6g | M4-6g | 12 | 16 | 64 |
| 10 | 4 | 67 | 50 | 10-100 | +1,5 | - | 20 | 22 | М12х1,25-6g | M4-6g | 12 | 16 | 64 | ||
| 12 | 6 | 97 | 64 | 10-125 | +1,5 | +2 | 24 | 26 | М16х1,5-6g | M6-6g | 16 | 22 | 75 | ||
| 16 | 6 | 175 | 140 | 10-160 | +1,5 | +2 | 24 | 27 | M16х1,5-6g | M6-6g | 16 | 22 | 82 | ||
| 20 | 8 | 280 | 230 | 10-200 | +1,5 | +2 | - | К 1/8" | 34 | 40 | M22х1,5-6g | M8-6g | 20 | 24 | 95 |
| 25 | 10 | 440 | 350 | 10-250 | +1,5 | +2 | 34 | 40 | М22х1,5-6g | M10х1,25-6g | 22 | 28 | 104 | ||
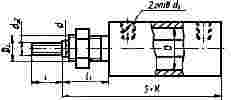
Черт.4. Миниатюрные пневмоцилиндры одностороннего действия толкающие с пружинным возвратом - тип А2
Миниатюрные пневмоцилиндры одностороннего действия
толкающие с пружинным возвратом - тип А2
| | Исполнение | Исполнение |
|
|
|
|

Черт.4
Таблица 3
Размеры, мм
|
|
| Номинальная толкающая сила в конце хода, Н, | Ход. |
|
|
|
|
|
|
|
| |
| метри- | коническая по ГОСТ 6111 | |||||||||||
| 8 | 4 | 33 | 12, 20, 25 | М5-6Н | - | 18 | 20 | М12х1,25-6g | M4-6g | 12 | 16 | 64 |
| 10 | 4 | 55 | 12, 20, 25 | 20 | 22 | М12х1,25-6g | M4-6g | 12 | 16 | 64 | ||
| 12 | 6 | 65 | 12, 20, 25 | 24 | 26 | M16х1,5-6g | M6-6g | 16 | 22 | 75 | ||
| 16 | 6 | 130 | 12, 20, 25 | 24 | 27 | M16х1,5-6g | M6-6g | 16 | 22 | 82 | ||
| 20 | 8 | 215 | 12, 20, 25, 50 | - | К 1/8" | 34 | 40 | M22х1,5-6g | M8-6g | 20 | 24 | 95 |
| 25 | 10 | 345 | 12, 20, 25, 50 | 34 | 40 | M22х1,5-6g | M10х1,25-6g | 22 | 28 | 104 | ||
Черт.5. Пневмоцилиндры двустороннего действия с усиленным штоком - тип С
Пневмоцилиндры двустороннего действия с усиленным штоком - тип С
Черт.5
Таблица 4
Размеры, мм
|
|
| Номиналь- | Ход поршня |
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
| тол- | тяну- | но- | пред. откл. | но- | пред. откл. | Резьба метри- | Резьба кони- | для исполнения | но- | пред. откл. | для испол- | не более | не менее | ||||||||||
| 1 | 2 | 1 | 2 | ||||||||||||||||||||
| 32 | 16 | 700 | 470 | 320, 400, 500 | +2 | 38 | 38 | ±0,1 | М14х1,5-6Н | 1/4" | М12х1,25-6g | - | М5 | 34 | ±0,22 | 45 | 24 | - | 65 | 16 | 25 | 4 | 161 |
| 630 | +3,2 | ||||||||||||||||||||||
| 40 | 18 | 1100 | 880 | 400, 500 | +2 | 38 | 48 | ±0,15 | 1/4" | - | М6 | 42 | ±0,28 | 55 | 24 | - | 65 | 18 | 25 | 4 | 165 | ||
| 630, 800 | +3,2 | ||||||||||||||||||||||
| 50 | 25 | 1700 | 1310 | 500 | +2 | 54 | 58 | ±0,15 | 1/4" | М20х1,5-6g | - | М8 | 52 | ±0,4 | 70 | 40 | - | 105 | 22 | 30 | 4 | 213 | |
| 32 | 1700 | 1020 | 630, 800, 1000 | +3,2 | 1/4" | - | М24х2-6Н | М8 | - | 32 | 120 | 22 | 30 | 4 | 228 | ||||||||
| 63 | 45 | 2750 | 1380 | 630, 800, | +4 | 68 | 72 | +0,3 | М18х1,5-6Н | 3/8" | М24х2-6g | М36х2-6Н | М8 | 60 | ±0,4 | 78 | 48 | 50 | 137 | 22 | 40 | 5 | 255 |
| 80 | 45 | 4450 | 3120 | 800, 1000, 1250, 1600 | +4 | 68 | 90 | +0,3 | 3/8" | М8 | 75 | ±0,4 | 95 | 48 | 137 | 27 | 40 | 5 | 257 | ||||
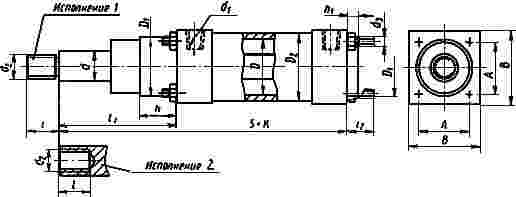
Черт.6. Поршневые поворотные пневмодвигатели со сплошным валом - тип D1
Поршневые поворотные пневмодвигатели со сплошным валом - тип D1
Черт.6
Таблица 5
Размеры, мм
| Типо- | Номина- | Угол пово- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|